USB 是连接计算机系统与外部设备的一种串口总线标准,也是一种输入输出接口的技术规范,被广泛地应用于个人电脑和移动设备等信息通讯产品,USB 就是简写,中文叫通用串行总线。
我们知道总线是用来通信的,所以USB总线就是一个种通信协议,你的设备支持什么协议就得使用哪一种总线协议与之通信。比如: EEPROM支持IIC协议,那么我们就得使用IIC总线与之通信,而EEPROM设备在制造过程中也必须遵循IIC协议设计。
在学习驱动开发实例之前,先了解几个USB总线通信的问题:
问题1: USB设备那么多,他们怎么分类的?USB设备按照传输类型分,主要分为4类:
a、控制传输;
b、中断传输;
c、等时传输;
d、批量传输。
其中控制传输时每个USB设备都必须支持的,通常用来获取设备描述符,设置设备的状态等。从USB设备插入到拔出的过程中一定为产生控制传输,不管当前设备是否被主机支持。
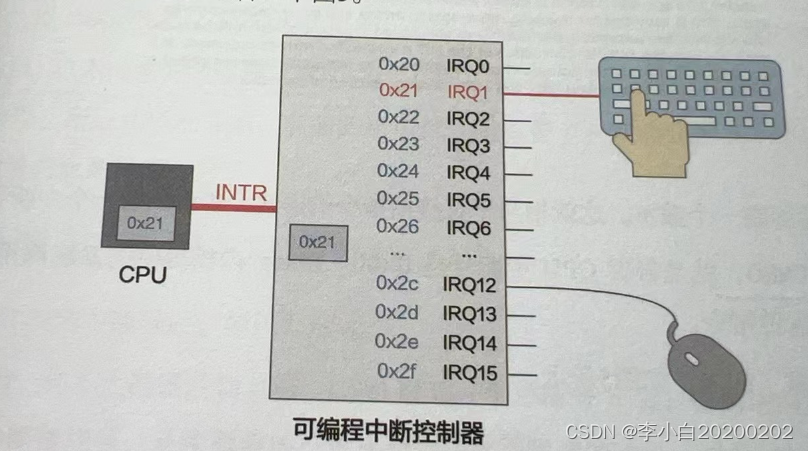
中断传输的经典代表是USB鼠标和USB键盘,这里说的中断不是真正硬件发出的中断,而是一种轮询机制,
USB设备驱动程序里可以设置轮询时间的间隔,也就是主机可以按照这个间隔时间来轮询设备。
批量传输的经典代表是U盘,数据可靠,时间不可靠。
等时传输的经典代表是摄像头,数据不可靠,时间可靠。
问题2: 当USB设备插入系统时(USB主机),系统怎么知道这是什么设备?
当USB设备插入系统之后,根据硬件设计的特性,会被USB主机控制器第一时间知道,然后主机控制器就会问当前插入的设备是什么设备。这里就引入了一个概念叫做描述符。
描述符有很多种,最基本的有4种:设备描述符、配置描述符、接口描述符、端点描述符。一个∪SB设备必须同时支持这四大描述符,一般这些描述符都存放在USB设备的EEPROM里。设备描述符包含了设备遵循的 USB 的版本号、设备类、设备子类、制造商、产品编号等信息,主机会通过控制传输的方式获取这个设备描述符,通过这个设备描述符就能知道当前是什么设备了。
USB鼠标与键盘驱动编写实例
Linux内核默认是支持鼠标驱动的,想要自己重新编写鼠标驱动,需要先将内核自带的鼠标驱动先去除掉。
[root@wbyq linux-3.5]# make menuconfig
Device Drivers --->
HID support --->
USB HID support --->
< > USB HID transport layer //传输层
Linux内核里自带的鼠标驱动源码: \drivers\hid\usbhid\usbmouse.c
Linux内核里自带的键盘驱动:源码 \drivers/usb/input/usbkbd.c
USB键盘和USB鼠标都属于HID人机交互类,都使用的是中断方式传输数据。代码区别只是匹配的类型不一样而已,其他处理代码通用。
下面是鼠标和键盘的模板:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/usb.h>
#include <linux/usb/input.h>
#include <linux/hid.h>
/*
本程序为USB鼠标驱动程序,要安装本驱动,需要先将内核自带的USB驱动程序卸载掉
*/
//定义USB的IDTAB 24ae:2002
static const struct usb_device_id tiny4412_usb_id[] = {
{//148f:7601
USB_DEVICE(0x148f,0x7601),/*360WIFI的制造商ID和产品ID */
USB_DEVICE(0x1c4f,0x0051),/*当前鼠标的ID 1c4f:0051*/
},
};
//USB鼠标的ID
static struct usb_device_id usb_mouse_id[] = {
{ USB_INTERFACE_INFO(USB_INTERFACE_CLASS_HID, USB_INTERFACE_SUBCLASS_BOOT,
USB_INTERFACE_PROTOCOL_MOUSE) },
{ }/* 终止进入 */
};
//USB键盘的ID
static struct usb_device_id usb_kbd_id_table [] = {
{ USB_INTERFACE_INFO(USB_INTERFACE_CLASS_HID, USB_INTERFACE_SUBCLASS_BOOT,
USB_INTERFACE_PROTOCOL_KEYBOARD) },
{ }
};
int size;
static unsigned char *buf =NULL;
static struct urb *myurb=NULL;
dma_addr_t buf_phy;
/*USB中断处理程序*/
static void usb_complete(struct urb *urb)
{
int i;
for(i=0;i<size;i++)
{
printk("0x%x ",buf[i]);
}
printk("\n");
/* 重新提交异步请求*/
usb_submit_urb(myurb, GFP_KERNEL);
}
//USB设备信息与驱动端匹配成功的时候调用。
static int usb_probe(struct usb_interface *intf,const struct usb_device_id *id)
{
printk("USB驱动匹配成功! ID: 0x%X,0x%X\n",id->idVendor,id->idProduct);
/*通过接口获取设备信息*/
struct usb_device *dev = interface_to_usbdev(intf);
/*获取当前接口设置*/
struct usb_host_interface *interface=intf->cur_altsetting;
/*获取端点描述符*/
struct usb_endpoint_descriptor *endpoint = &interface->endpoint[0].desc;
/*中断传输:创建输入管道*/
int pipe = usb_rcvintpipe(dev, endpoint->bEndpointAddress);
/*从端点描述符中获取传输的数据大小 */
size = endpoint->wMaxPacketSize;
printk("设备传输数据包大小:%d\n",size);
/*分配数据传输缓冲区*/
buf = usb_alloc_coherent(dev,size,GFP_ATOMIC,&buf_phy);
/*分配新的urb,urb是usb设备驱动中用来描述与usb设备通信所用的基本载体和核心数据结构*/
myurb = usb_alloc_urb(0,GFP_KERNEL);
/*中断方式初始化urb*/
usb_fill_int_urb(myurb,dev,pipe,buf,size,usb_complete,NULL,endpoint->bInterval);
myurb->transfer_dma = buf_phy;
myurb->transfer_flags |= URB_NO_TRANSFER_DMA_MAP;
/*为端点提交异步传输请求*/
usb_submit_urb(myurb, GFP_KERNEL);
return 0;
}
//USB断开的时候调用
static void usb_disconnect(struct usb_interface *intf)
{
struct usb_device *dev = interface_to_usbdev(intf);
usb_kill_urb(myurb);
usb_free_urb(myurb);
usb_free_coherent(dev,size,buf, buf_phy);
printk("USB 设备释放成功!\n");
}
//定义USB驱动结构体
static struct usb_driver tiny4412_usb_driver = {
.name = "tiny4412_usb",
.id_table = usb_kbd_id_table,
.probe = usb_probe,
.disconnect = usb_disconnect
};
static int __init tiny4412_usb_init(void)
{
//注册USB设备驱动
usb_register(&tiny4412_usb_driver);
return 0;
}
static void __exit tiny4412_usb_exit(void)
{
注销USB设备驱动
usb_deregister(&tiny4412_usb_driver);
}
module_init(tiny4412_usb_init);
module_exit(tiny4412_usb_exit);
MODULE_AUTHOR("xiaolong");
MODULE_LICENSE("GPL");
1.3 USB电子扫码枪驱动编写实例
USB电子扫码枪的驱动与USB键盘驱动通用,只是数据包的大小是64字节,匹配的类型也是使用键盘的类型。
说明: USB电子扫码枪和USB键盘输出的数据都是以掩码的值输出。
//USB键盘的ID
static struct usb_device_id usb_kbd_id_table [] = {
{ USB_INTERFACE_INFO(USB_INTERFACE_CLASS_HID, USB_INTERFACE_SUBCLASS_BOOT,
USB_INTERFACE_PROTOCOL_KEYBOARD) },
{ }
};
要测试电子扫码枪的驱动,也需要先将内核自带的USB键盘去掉先去掉在测试。
#include <linux/init.h>
#include <linux/module.h>
#include <linux/usb.h>
#include <linux/usb/input.h>
#include <linux/hid.h>
/*
本程序为USB鼠标驱动程序,要安装本驱动,需要先将内核自带的USB驱动程序卸载掉
*/
//定义USB的IDTAB 24ae:2002
static const struct usb_device_id tiny4412_usb_id[] = {
{//148f:7601
USB_DEVICE(0x148f,0x7601),/*360WIFI的制造商ID和产品ID */
USB_DEVICE(0x1c4f,0x0051),/*鼠标的ID 1c4f:0051*/
USB_DEVICE(0x0483,0x0011),/*电子扫描枪的ID 1c4f:0051*/
},
};
//USB鼠标的ID
static struct usb_device_id usb_mouse_id[] = {
{ USB_INTERFACE_INFO(USB_INTERFACE_CLASS_HID, USB_INTERFACE_SUBCLASS_BOOT,
USB_INTERFACE_PROTOCOL_MOUSE) },
{ }/* 终止进入 */
};
//USB键盘的ID
static struct usb_device_id usb_kbd_id_table [] = {
{ USB_INTERFACE_INFO(USB_INTERFACE_CLASS_HID, USB_INTERFACE_SUBCLASS_BOOT,
USB_INTERFACE_PROTOCOL_KEYBOARD) },
{ }
};
int size;
static unsigned char *buf =NULL;
static struct urb *myurb=NULL;
dma_addr_t buf_phy;
/*USB中断处理程序*/
static void usb_complete(struct urb *urb)
{
int i;
/*
for(i=0;i<size;i++)
{
if(buf[i]!=0)printk("%d,%d\n",buf[i],i);
}
printk("\n");
*/
//每包数据都是存放在buf[2]里,并且以掩码的形式存放,如果需要得到真实的
//按键值,需要根据键盘的规则找到对应的码值
if(buf[2]!=0)printk("0x%x\n",buf[2]);
/* 重新提交异步请求*/
usb_submit_urb(myurb, GFP_KERNEL);
}
//USB设备信息与驱动端匹配成功的时候调用。
static int usb_probe(struct usb_interface *intf,const struct usb_device_id *id)
{
printk("USB驱动匹配成功! ID: 0x%X,0x%X\n",id->idVendor,id->idProduct);
/*通过接口获取设备信息*/
struct usb_device *dev = interface_to_usbdev(intf);
/*获取当前接口设置*/
struct usb_host_interface *interface=intf->cur_altsetting;
/*获取端点描述符*/
struct usb_endpoint_descriptor *endpoint = &interface->endpoint[0].desc;
/*中断传输:创建输入管道*/
int pipe = usb_rcvintpipe(dev, endpoint->bEndpointAddress);
/*从端点描述符中获取传输的数据大小 */
size = endpoint->wMaxPacketSize;
printk("设备传输数据包大小:%d\n",size);
/*分配数据传输缓冲区*/
buf = usb_alloc_coherent(dev,size,GFP_ATOMIC,&buf_phy);
/*分配新的urb,urb是usb设备驱动中用来描述与usb设备通信所用的基本载体和核心数据结构*/
myurb = usb_alloc_urb(0,GFP_KERNEL);
/*中断方式初始化urb*/
usb_fill_int_urb(myurb,dev,pipe,buf,size,usb_complete,NULL,endpoint->bInterval);
myurb->transfer_dma = buf_phy;
myurb->transfer_flags |= URB_NO_TRANSFER_DMA_MAP;
/*为端点提交异步传输请求*/
usb_submit_urb(myurb, GFP_KERNEL);
return 0;
}
//USB断开的时候调用
static void usb_disconnect(struct usb_interface *intf)
{
struct usb_device *dev = interface_to_usbdev(intf);
usb_kill_urb(myurb);
usb_free_urb(myurb);
usb_free_coherent(dev,size,buf, buf_phy);
printk("USB 设备释放成功!\n");
}
//定义USB驱动结构体
static struct usb_driver tiny4412_usb_driver = {
.name = "tiny4412_usb",
.id_table =usb_kbd_id_table,//,
.probe = usb_probe,
.disconnect = usb_disconnect
};
static int __init tiny4412_usb_init(void)
{
//注册USB设备驱动
usb_register(&tiny4412_usb_driver);
return 0;
}
static void __exit tiny4412_usb_exit(void)
{
注销USB设备驱动
usb_deregister(&tiny4412_usb_driver);
}
module_init(tiny4412_usb_init);
module_exit(tiny4412_usb_exit);
MODULE_AUTHOR("xiaolong");
MODULE_LICENSE("GPL");
1.4 USB摄像头编写实例
要自己编写自己的UVC摄像头驱动,需要先将内核自带的驱动去掉。
Device Drivers --->
<*> Multimedia support --->
[*] Video capture adapters --->
[] V4L USB devices ---> //将*号去掉即可
示例:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/usb.h>
#include <linux/usb/input.h>
#include <linux/hid.h>
#define UVC_MAX_STATUS_SIZE16
static unsigned char *buf =NULL;
static struct usb_device_id uvc_ids[] = {
{ USB_INTERFACE_INFO(USB_CLASS_VIDEO, 1, 0) },
{}
};
static struct urb *video_urb=NULL;
/*USB中断处理程序*/
static void usb_complete(struct urb *urb)
{
int len, ret;
switch (urb->status) {
case 0:
break;
case -ENOENT:/* usb_kill_urb() called. */
case -ECONNRESET:/* usb_unlink_urb() called. */
case -ESHUTDOWN:/* The endpoint is being disabled. */
case -EPROTO:/* Device is disconnected (reported by some
* host controller). */
return;
default:
printk("Non-zero status (%d) in status completion handler.\n", urb->status);
return;
}
len = urb->actual_length;
printk("len=%d\n",len);
//urb->interval = dev->int_ep->desc.bInterval;
usb_submit_urb(urb, GFP_ATOMIC);
}
//USB设备信息与驱动端匹配成功的时候调用。
static int usb_probe(struct usb_interface *intf,const struct usb_device_id *id)
{
struct usb_device *udev = interface_to_usbdev(intf);
int ret;
if (id->idVendor && id->idProduct)
{
printk("%s,%d,%d\n",udev->devpath, id->idVendor,id->idProduct);
}
else
{
printk("通用UVC设备:%s\n",udev->devpath);
}
/*分配新的urb,urb是usb设备驱动中用来描述与usb设备通信所用的基本载体和核心数据结构*/
video_urb=usb_alloc_urb(0, GFP_KERNEL);
/*通过接口获取设备信息*/
struct usb_device *dev = interface_to_usbdev(intf);
/*获取当前接口设置*/
struct usb_host_interface *interface=intf->cur_altsetting;
/*获取端点描述符*/
struct usb_endpoint_descriptor *endpoint = &interface->endpoint[0].desc;
/*中断传输:创建输入管道*/
int pipe = usb_rcvintpipe(dev, endpoint->bEndpointAddress);
buf=kzalloc(UVC_MAX_STATUS_SIZE, GFP_KERNEL);
/*中断方式初始化urb*/
usb_fill_int_urb(video_urb,dev,pipe,buf,UVC_MAX_STATUS_SIZE,usb_complete,NULL,endpoint->bInterval);
/*使能自动暂停*/
usb_submit_urb(video_urb, GFP_ATOMIC);
//usb_enable_autosuspend(udev);
return 0;
}
//USB断开的时候调用
static void usb_disconnect(struct usb_interface *intf)
{
struct usb_device *dev = interface_to_usbdev(intf);
usb_kill_urb(video_urb);
usb_free_urb(video_urb);
usb_set_intfdata(intf, NULL);
kfree(buf);
printk("USB 设备释放成功!\n");
}
//定义USB驱动结构体
static struct usb_driver tiny4412_usb_driver = {
.name = "tiny4412_usb",
.id_table =uvc_ids,
.probe = usb_probe,
.disconnect = usb_disconnect
};
static int __init tiny4412_usb_init(void)
{
//注册USB设备驱动
usb_register(&tiny4412_usb_driver);
return 0;
}
static void __exit tiny4412_usb_exit(void)
{
注销USB设备驱动
usb_deregister(&tiny4412_usb_driver);
}
module_init(tiny4412_usb_init);
module_exit(tiny4412_usb_exit);
MODULE_AUTHOR("xiaolong");
MODULE_LICENSE("GPL");